JRのPCM9XⅡでの設定方法です(写真をクリックすると大きく表示されます)。
まず、受信機へのサーボ接続です。(取説でバタフライミキシングのサーボ接続が間違っていますので注意!)
| CH1 |
左エルロン |
CH5 |
右フラップ |
| CH2 |
右エルロン |
CH6 |
左フラップ |
| CH3 |
エレベーター(右尾翼) |
CH9
(AUX4) |
ESC(モーターコントロール) |
| CH4 |
ラダー(左尾翼) |
|
|
※ 写真では、PCM9Xとなっていますが、これはバージョンUPをした送信機なのでご了承願いします。
現在JRでは、バージョンUPのサービスを行っていません。
当店でセッティングしている一例です。他の方法もあると思いますので設定は自己責任でお願いします。 |
 |
システムモード(ENT押しながらSW ON)で起動し
Type SELでグライダーを選びます。
(一番左) |
|
|
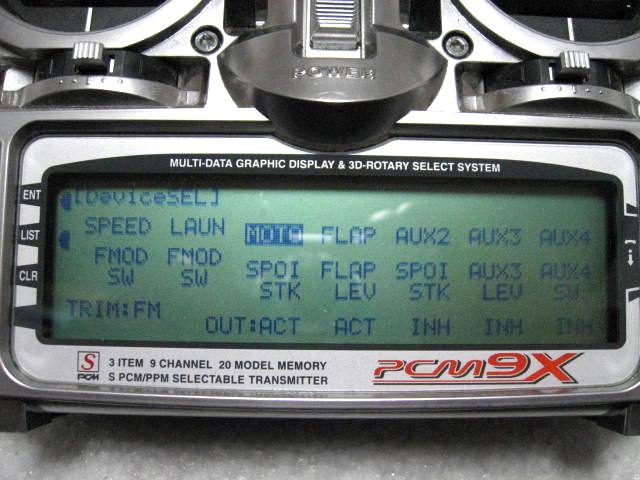
次にDeviceSELでMOTOを動かすDeviceを
MOTO SWからSPOI ST(エンコンスティックです)に
変更します。
また、使わない他のAUX2~4はINHにします。 |
 |
Wing TYPEでDUAL FLAPをACTに設定
V-tailもACTに! |
 |
次にファンクションモード(ENTをおしてLISTで選択)
にすます。
PROG.ING Mix3でMOTO→AUX4にミキシングをかけます。
ここでは、Pos0 でスティック上下ともに+100%です。
ここで、デュアルフラップによって本来5chがモータコントロールがフラップに使われるため、AUX4にミキシングを掛け、チャンネルを確保します。 |
 |
ButterflyでSW SELECTでBTFを上にあげ、写真のように
設定します。数値は、任意に調整してください。
SPOI→FLAP は、100%にしてください。
|
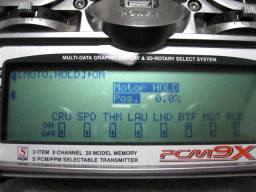 |
最後にMOTO.HOLDで写真のように設定します。
特にBTFをONにしてください。
これで、MIXスイッチ(グライダーモードでは、バタフライスイッチ)を手前にすると
モーターがカットされます。 |
以上で設定完了ですが、実際に機体で確認する前にMONITOR画面でサーボの動きを確認してから行ってください。
思わぬときにモーターが回ると危険です。 |